Mẫu rover Tumbleweed hình cầu dùng năng lượng gió và mặt trời đã vượt qua thử nghiệm kỹ thuật quan trọng tại đường hầm gió và mỏ đá giả lập sao Hỏa. Thiết kế gập gọn giúp giảm chi phí phóng, đồng thời swarm rover sẽ khảo sát tính khả dụng của bề mặt sao Hỏa trước khi trở thành mạng lưới cảm biến cố định.
Điểm nổi bật:
- Rover Tumbleweed hình cầu được điều khiển hoàn toàn bằng gió, hứa hẹn khám phá chi phí thấp trên sao Hỏa.
- Hệ thống sáu cánh buồm tích hợp pin mặt trời cho phép hoạt động liên tục và gập gọn để vận chuyển.
- Nhóm Team Tumbleweed đặt mục tiêu triển khai bầy đàn rover vào năm 2034, mở rộng phạm vi khám phá.
- Kiểm tra tại đường hầm gió và hiện trường đã xác nhận tính khả thi trên địa hình và điều kiện giống sao Hỏa.
- Mạng lưới rover sau cùng sẽ chuyển đổi thành trạm đo đạc cố định, thu thập dữ liệu bức xạ, từ trường và dấu vết nước ngầm.

Điểm chính
Khám phá thế hệ tiếp theo trên sao Hỏa sẽ sử dụng gió để thúc đẩy rover Tumbleweed – một robot hình cầu có thể cuộn trên bề mặt hành tinh Đỏ. Thiết kế này đã vượt qua các thử nghiệm quan trọng, chứng minh khả năng triển khai chi phí thấp và ở quy mô lớn.
Khái niệm do Team Tumbleweed (được Trung tâm Ươm tạo Kinh doanh ESA hỗ trợ) phát triển, dự kiến phóng một bầy đoàn rover vào năm 2034. Các thử nghiệm tại Đường hầm Môi trường Hành tinh, Đại học Aarhus và mỏ đá ở Hà Lan đã xác nhận rover có thể di chuyển trên địa hình giống sao Hỏa. Kết quả được trình bày tại hội nghị EPSC-DPS 2025, làm rõ tiềm năng của sứ mệnh swarm nhằm lấp đầy khoảng trống giữa vệ tinh quỹ đạo và rover truyền thống.
“Các chiến dịch thử nghiệm gần đây trong đường hầm gió và hiện trường đã đánh dấu bước ngoặt cho rover Tumbleweed. Bây giờ chúng tôi có bằng chứng thực nghiệm rằng rover có thể vận hành và thu thập dữ liệu trên sao Hỏa,” James Kingsnorth, trưởng bộ phận khoa học Team Tumbleweed, cho biết trong thông cáo ngày 25/9.
Mô hình rover thế hệ mới
Rover Tumbleweed có đường kính 5 mét, với sáu cánh buồm xếp tại các đỉnh hình tứ diện. Các cánh này chứa tấm pin mặt trời để cấp điện và sạc lại pin ban đêm. Khi gập gọn, rover biến thành đĩa mỏng, tối ưu không gian vận chuyển và hỗ trợ giảm tốc khi hạ cánh.
Dựa trên mô hình Hadley cell, gió gần cực sao Hỏa sẽ thổi rover về phía xích đạo, nơi luồng khí ấm nâng lên rồi di chuyển ngược lại. Dù có bão cát và hiệu ứng Coriolis, gió được dự đoán đủ mạnh và ổn định để đẩy rover tiến.
Swarm rover sẽ lập bản đồ hành trình, xác định khu vực có thể hỗ trợ sự sống hoặc căn cứ tương lai. Trang bị camera, phổ kế neutron và từ kế, chúng tìm dấu hiệu từ trường, bức xạ thấp và nước ngầm. Ở giai đoạn cuối, rover sẽ biến thành trạm đo cố định, tạo mạng cảm biến phân tán dài hạn trên bề mặt.
Ý tưởng Tumbleweed, từng được NASA JPL thí nghiệm prototype 1,8 mét di chuyển 64 km ở Nam Cực năm 2004, đã được Team Tumbleweed tái khởi xướng từ 2017. Sau nhiều vòng thử nghiệm ở Oman và Negev, nhóm đặt mục tiêu phóng 90 rover vào 2034, tùy thuộc vào tính ổn định công nghệ.
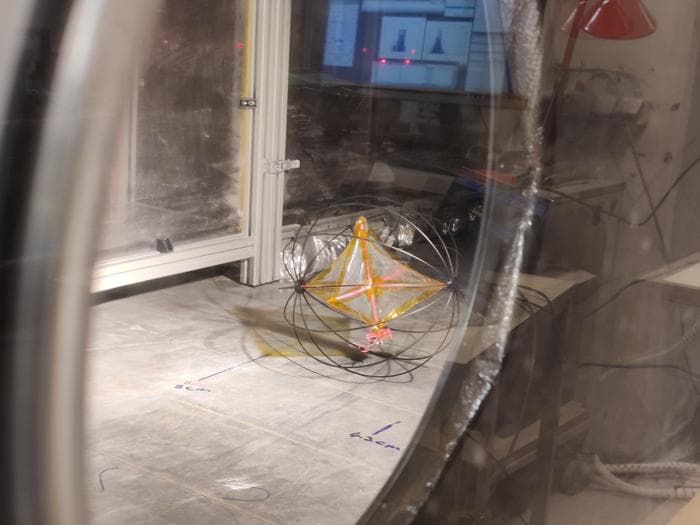
Thử nghiệm trong môi trường giống sao Hỏa

Team Tumbleweed đã thực hiện hai giai đoạn thử nghiệm quan trọng. Ở Hà Lan, mẫu thử 2,7 m đã thu thập dữ liệu bằng cảm biến thương mại khi cuộn trên địa hình gồ ghề.
Tiếp theo, Đại học Aarhus tiến hành thử nghiệm trong đường hầm gió mô phỏng áp suất 17 mbar như sao Hỏa. Các prototype đường kính 30–50 cm cho thấy gió 9–10 m/s đủ để di chuyển rover trên cát, sỏi và regolith, thậm chí leo dốc tương đương 30 độ.
Dữ liệu từ InSight cho thấy bán cầu bắc sao Hỏa mùa hè có gió ban ngày khoảng 10 m/s. Với vận tốc này, rover có thể di chuyển trung bình 422 km trong 100 sol, tốc độ ~0,36 km/h. Trong điều kiện thuận lợi, tầm hoạt động tối đa có thể đạt 2.800 km.
Thay đổi mô hình khám phá
Khái niệm Tumbleweed mở ra xu hướng mới so với rover bánh truyền thống như Perseverance. Cùng thời điểm, dự án Skyfall đề xuất bầy drone bay tản để khảo sát nhanh. Trong khi Skyfall ưu tiên bản đồ trên cao, Tumbleweed lưu động mặt đất thu thập dữ liệu dài hạn trước khi tạo mạng lưới trạm cố định.
Chiến dịch thử nghiệm thành công khẳng định tiềm năng khám phá đại trà chi phí thấp trên sao Hỏa. Giai đoạn tiếp theo là tích hợp cảm biến bức xạ, đầu dò đất và cảm biến bụi, chuẩn bị cho chuyến thử nghiệm ở sa mạc Atacama tháng 11/2025.
Có thể bạn quan tâm
Nhìn về tương lai, công nghệ rover Tumbleweed không chỉ thay đổi cách chúng ta tiếp cận sao Hỏa mà còn mở ra cơ hội cho các quốc gia và tổ chức nghiên cứu nhỏ tiếp cận sứ mệnh hành tinh. Khả năng hạ cánh ở bất cứ địa hình nào và di chuyển nhờ năng lượng tự nhiên giúp giảm chi phí phóng so với rover truyền thống, từ đó dân Việt Nam hoàn toàn có thể học hỏi để phát triển dự án robot tự hành sử dụng năng lượng tái tạo trong các lĩnh vực khác như nông nghiệp, môi trường.
Tại Việt Nam, việc áp dụng nguyên lý gập gọn và tự động hóa bằng yếu tố tự nhiên (gió, ánh sáng) có thể thúc đẩy sáng chế trong nông nghiệp thông minh, giám sát môi trường ven biển hoặc quan trắc bão cát tại miền Trung. Sự linh hoạt của swarm robot cũng phù hợp với địa hình đa dạng và thách thức của nước ta, từ đồi núi Tây Bắc đến Đồng bằng sông Cửu Long.
Việc nghiên cứu và chuyển giao công nghệ rover Tumbleweed còn góp phần nâng cao năng lực công nghệ vũ trụ của Việt Nam, phát triển nguồn nhân lực chuyên môn cao và tăng cường hợp tác quốc tế trong lĩnh vực không gian.